This is the lightweight laser altimeter SF11C developed and design by LightWave Optoelectronics,. This devices is ideal for UAV’s, (Unmanned Autonomous Vehicles) it can also serve as highly effective rangefinder in variety of application. TOF (Time of flight) system makes accurate distances measurement that does not effected by the air, change in barometric pressure, noise, ambient light or air temperature. This devices can be easily hook to your projects and ready to use with no calibration needed, you can use pins which indicated at board or using USB A to micro-B cable to read the data measured from the laser at 9600~115200 kbps bound rate.
The SF11C can be used in ground and air UAV’s detecting distance at the ground or surface, can be also used to calculate speed of moving objects or vehicles, measuring depth of material in snow, fluid, sand from above, counting passing objects in a monitoring or control system.

Required Components
- Arduino Microcontroller, NodeMCU, Teensy Board, TeensyDuino, ESP8266 12, 12E, ESP8266 NodeMCU, ESPDuino, ATMEGA328 16/12, ATMEGA32u4 16/8/ MHz, ESP8266, ATMEGA250 16 MHz, ATSAM3x8E, ATSAM21D, ATTINY85 16/8 MHz (Note: The Diagram below is using NANO. (please refer to the respective pin-outs)
- SF10A / SF10B / SF10C / SF11C Laser Altimeter
- Jumper Wires / DuPont Wires
- Prototyping PCB board (Optional)
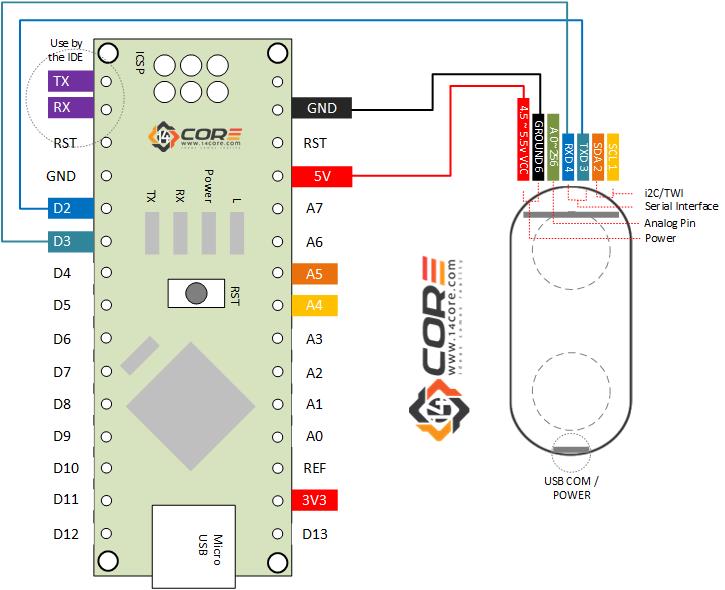
Wiring Guide
Source Code
Downloads
Download SF11C Datasheet | PDF



