This is an MHZ14 NDIR Infrared Gas sensor, design specialize to detect an existence of Carbon Dioxide (C02) in air and non-oxygen defendant. This sensor has a non-dispersive infrared or NDIR principle design in a tight integration of infrared absorbing gas detection technology & it has a built-in temperature sensor and digital/analog output, designed for indoor air quality monitoring, industrial process, safety and protection monitoring, agriculture and animal farming production process monitoring.
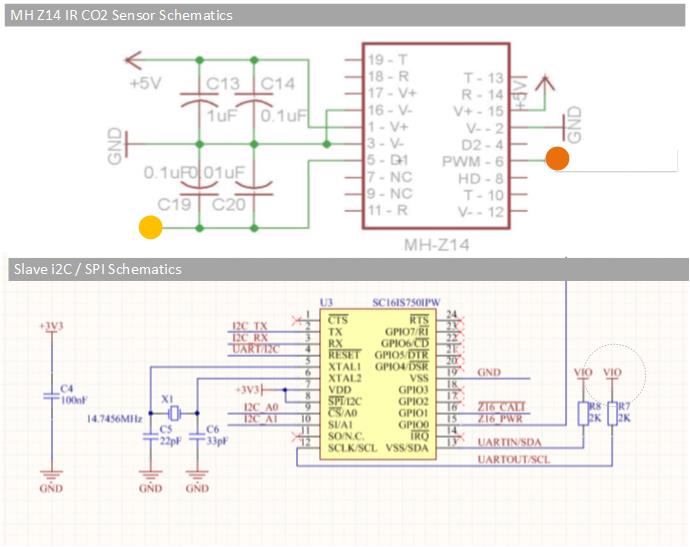
The MH-14 uses SC16IS7XX i2C Slave SPI interface. The SC16IS is a slave i2C SPI interface to a single channel HIGH performance UART, it offers data rates up to 5 Mbit/s running at low power with sleeping current and also provide the application with 8 programmable IO pins. The SC16I enables seamless protocol conversion from i2C us or SPI, and RS232 or RS485 and fully bidirectional for more details please refer to the datasheet below.
Required Components
- Arduino Microcontroller, ESP8266 12, 12E, ESP8266 NodeMCU, ESPDuino, ATMEGA328 16/12, ATMEGA32u4 16/8/ MHz, ESP8266, ATMEGA250 16 MHz, ATSAM3x8E, ATSAM21D, ATTINY85 16/8 MHz (Note: The Diagram below is using NANO. (please refer to the respective pin-outs)
- MH-Z14 CO2 Sensor
- Solder Less Bread Board
- Jumper Wire / DuPont Wire
Wiring Guide
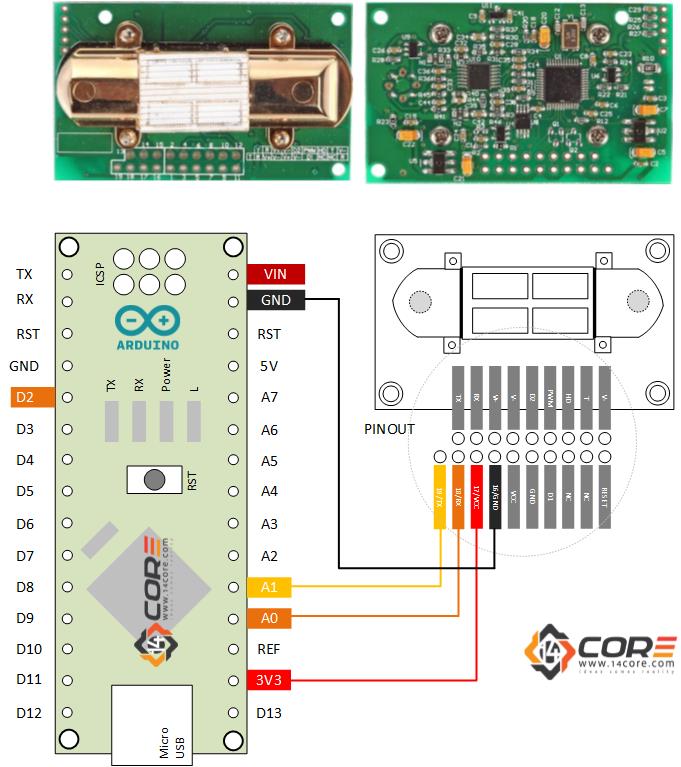
Schematics Diagram
Sketch Code
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
#include <SoftwareSerial.h> SoftwareSerial SerialCom (A0,A1); int myDelay = 10000; byte addArray[] = { 0xFF, 0x01, 0x86, 0x00, 0x00, 0x00, 0x00, 0x00, 0x79 }; char dataValue[9]; string dataString = ""; void setup(){ Serial.begin(9600); SerialCom.begin(9600); Serial.println("14CORE | MH-Z14 C02 Sensor Test Code") Serial.println("------------------------------------") } void loop{ SerialCom.write(addArray, 9); SerialCom.readBytes(dataValue, 9) int resHigh = (int) dataValue[2]; int resLow = (int) dataValue[3]; int pulse = (256*resHigh)+resLow; dataString = String(pulse); Serial.print("PPM : "); Serial.println(pulse); delay(myDelay); } |
Source Code for AVR
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 |
#include <avr/io.h> #include <avr/interrupt.h> #include <avr/pgmspace.h> #include "uart.h" /* size of RX/TX buffers */ #define UART_RX_BUFFER_MASK ( UART_RX_BUFFER_SIZE - 1) #define UART_TX_BUFFER_MASK ( UART_TX_BUFFER_SIZE - 1) #if ( UART_RX_BUFFER_SIZE & UART_RX_BUFFER_MASK ) #error RX buffer size is not a power of 2 #endif #if ( UART_TX_BUFFER_SIZE & UART_TX_BUFFER_MASK ) #error TX buffer size is not a power of 2 #endif #if defined(__AVR_AT90S2313__) \ || defined(__AVR_AT90S4414__) || defined(__AVR_AT90S4434__) \ || defined(__AVR_AT90S8515__) || defined(__AVR_AT90S8535__) \ || defined(__AVR_ATmega103__) /* old AVR classic or ATmega103 with one UART */ #define AT90_UART #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA #define UART0_STATUS USR #define UART0_CONTROL UCR #define UART0_DATA UDR #define UART0_UDRIE UDRIE #elif defined(__AVR_AT90S2333__) || defined(__AVR_AT90S4433__) /* old AVR classic with one UART */ #define AT90_UART #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA #define UART0_STATUS UCSRA #define UART0_CONTROL UCSRB #define UART0_DATA UDR #define UART0_UDRIE UDRIE #elif defined(__AVR_ATmega8__) || defined(__AVR_ATmega16__) || defined(__AVR_ATmega32__) \ || defined(__AVR_ATmega8515__) || defined(__AVR_ATmega8535__) \ || defined(__AVR_ATmega323__) /* ATmega with one USART */ #define ATMEGA_USART #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA #define UART0_STATUS UCSRA #define UART0_CONTROL UCSRB #define UART0_DATA UDR #define UART0_UDRIE UDRIE #elif defined(__AVR_ATmega163__) /* ATmega163 with one UART */ #define ATMEGA_UART #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA #define UART0_STATUS UCSRA #define UART0_CONTROL UCSRB #define UART0_DATA UDR #define UART0_UDRIE UDRIE #elif defined(__AVR_ATmega162__) /* ATmega with two USART */ #define ATMEGA_USART0 #define ATMEGA_USART1 #define UART0_RECEIVE_INTERRUPT SIG_USART0_RECV #define UART1_RECEIVE_INTERRUPT SIG_USART1_RECV #define UART0_TRANSMIT_INTERRUPT SIG_USART0_DATA #define UART1_TRANSMIT_INTERRUPT SIG_USART1_DATA #define UART0_STATUS UCSR0A #define UART0_CONTROL UCSR0B #define UART0_DATA UDR0 #define UART0_UDRIE UDRIE0 #define UART1_STATUS UCSR1A #define UART1_CONTROL UCSR1B #define UART1_DATA UDR1 #define UART1_UDRIE UDRIE1 #elif defined(__AVR_ATmega64__) || defined(__AVR_ATmega128__) /* ATmega with two USART */ #define ATMEGA_USART0 #define ATMEGA_USART1 #define UART0_RECEIVE_INTERRUPT SIG_UART0_RECV #define UART1_RECEIVE_INTERRUPT SIG_UART1_RECV #define UART0_TRANSMIT_INTERRUPT SIG_UART0_DATA #define UART1_TRANSMIT_INTERRUPT SIG_UART1_DATA #define UART0_STATUS UCSR0A #define UART0_CONTROL UCSR0B #define UART0_DATA UDR0 #define UART0_UDRIE UDRIE0 #define UART1_STATUS UCSR1A #define UART1_CONTROL UCSR1B #define UART1_DATA UDR1 #define UART1_UDRIE UDRIE1 #elif defined(__AVR_ATmega161__) /* ATmega with UART */ #error "AVR ATmega161 currently not supported by this libaray !" #elif defined(__AVR_ATmega169__) /* ATmega with one USART */ #define ATMEGA_USART #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA #define UART0_STATUS UCSRA #define UART0_CONTROL UCSRB #define UART0_DATA UDR #define UART0_UDRIE UDRIE #elif defined(__AVR_ATmega48__) ||defined(__AVR_ATmega88__) || defined(__AVR_ATmega168__) || defined(__AVR_ATmega48P__) || defined(__AVR_ATmega88P__) || defined(__AVR_ATmega168P__) || defined(__AVR_ATmega328P__) /* ATmega with one USART */ #define ATMEGA_USART0 #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA #define UART0_STATUS UCSR0A #define UART0_CONTROL UCSR0B #define UART0_DATA UDR0 #define UART0_UDRIE UDRIE0 #elif defined(__AVR_ATtiny2313__) #define ATMEGA_USART #define UART0_RECEIVE_INTERRUPT SIG_USART0_RX #define UART0_TRANSMIT_INTERRUPT SIG_USART0_UDRE #define UART0_STATUS UCSRA #define UART0_CONTROL UCSRB #define UART0_DATA UDR #define UART0_UDRIE UDRIE #elif defined(__AVR_ATmega329__) ||defined(__AVR_ATmega3290__) ||\ defined(__AVR_ATmega649__) ||defined(__AVR_ATmega6490__) ||\ defined(__AVR_ATmega325__) ||defined(__AVR_ATmega3250__) ||\ defined(__AVR_ATmega645__) ||defined(__AVR_ATmega6450__) /* ATmega with one USART */ #define ATMEGA_USART0 #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA #define UART0_STATUS UCSR0A #define UART0_CONTROL UCSR0B #define UART0_DATA UDR0 #define UART0_UDRIE UDRIE0 #elif defined(__AVR_ATmega2560__) || defined(__AVR_ATmega2561__) || defined(__AVR_ATmega1280__) || defined(__AVR_ATmega1281__) || defined(__AVR_ATmega640__) /* ATmega with two USART */ #define ATMEGA_USART0 #define ATMEGA_USART1 #define UART0_RECEIVE_INTERRUPT SIG_USART0_RECV #define UART1_RECEIVE_INTERRUPT SIG_USART1_RECV #define UART0_TRANSMIT_INTERRUPT SIG_USART0_DATA #define UART1_TRANSMIT_INTERRUPT SIG_USART1_DATA #define UART0_STATUS UCSR0A #define UART0_CONTROL UCSR0B #define UART0_DATA UDR0 #define UART0_UDRIE UDRIE0 #define UART1_STATUS UCSR1A #define UART1_CONTROL UCSR1B #define UART1_DATA UDR1 #define UART1_UDRIE UDRIE1 #elif defined(__AVR_ATmega644__) /* ATmega with one USART */ #define ATMEGA_USART0 #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA #define UART0_STATUS UCSR0A #define UART0_CONTROL UCSR0B #define UART0_DATA UDR0 #define UART0_UDRIE UDRIE0 #elif defined(__AVR_ATmega164P__) || defined(__AVR_ATmega324P__) || defined(__AVR_ATmega644P__) /* ATmega with two USART */ #define ATMEGA_USART0 #define ATMEGA_USART1 #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV #define UART1_RECEIVE_INTERRUPT SIG_USART1_RECV #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA #define UART1_TRANSMIT_INTERRUPT SIG_USART1_DATA #define UART0_STATUS UCSR0A #define UART0_CONTROL UCSR0B #define UART0_DATA UDR0 #define UART0_UDRIE UDRIE0 #define UART1_STATUS UCSR1A #define UART1_CONTROL UCSR1B #define UART1_DATA UDR1 #define UART1_UDRIE UDRIE1 #else #error "no UART definition for MCU available" #endif /* * module global variables */ static volatile unsigned char UART_TxBuf[UART_TX_BUFFER_SIZE]; static volatile unsigned char UART_RxBuf[UART_RX_BUFFER_SIZE]; static volatile unsigned char UART_TxHead; static volatile unsigned char UART_TxTail; static volatile unsigned char UART_RxHead; static volatile unsigned char UART_RxTail; static volatile unsigned char UART_LastRxError; #if defined( ATMEGA_USART1 ) static volatile unsigned char UART1_TxBuf[UART_TX_BUFFER_SIZE]; static volatile unsigned char UART1_RxBuf[UART_RX_BUFFER_SIZE]; static volatile unsigned char UART1_TxHead; static volatile unsigned char UART1_TxTail; static volatile unsigned char UART1_RxHead; static volatile unsigned char UART1_RxTail; static volatile unsigned char UART1_LastRxError; #endif SIGNAL(UART0_RECEIVE_INTERRUPT) /************************************************************************* Function: UART Receive Complete interrupt Purpose: called when the UART has received a character **************************************************************************/ { unsigned char tmphead; unsigned char data; unsigned char usr; unsigned char lastRxError; /* read UART status register and UART data register */ usr = UART0_STATUS; data = UART0_DATA; /* */ #if defined( AT90_UART ) lastRxError = (usr & (_BV(FE)|_BV(DOR)) ); #elif defined( ATMEGA_USART ) lastRxError = (usr & (_BV(FE)|_BV(DOR)) ); #elif defined( ATMEGA_USART0 ) lastRxError = (usr & (_BV(FE0)|_BV(DOR0)) ); #elif defined ( ATMEGA_UART ) lastRxError = (usr & (_BV(FE)|_BV(DOR)) ); #endif /* calculate buffer index */ tmphead = ( UART_RxHead + 1) & UART_RX_BUFFER_MASK; if ( tmphead == UART_RxTail ) { /* error: receive buffer overflow */ lastRxError = UART_BUFFER_OVERFLOW >> 8; }else{ /* store new index */ UART_RxHead = tmphead; /* store received data in buffer */ UART_RxBuf[tmphead] = data; } UART_LastRxError = lastRxError; } SIGNAL(UART0_TRANSMIT_INTERRUPT) /************************************************************************* Function: UART Data Register Empty interrupt Purpose: called when the UART is ready to transmit the next byte **************************************************************************/ { unsigned char tmptail; if ( UART_TxHead != UART_TxTail) { /* calculate and store new buffer index */ tmptail = (UART_TxTail + 1) & UART_TX_BUFFER_MASK; UART_TxTail = tmptail; /* get one byte from buffer and write it to UART */ UART0_DATA = UART_TxBuf[tmptail]; /* start transmission */ }else{ /* tx buffer empty, disable UDRE interrupt */ UART0_CONTROL &= ~_BV(UART0_UDRIE); } } /************************************************************************* Function: uart_init() Purpose: initialize UART and set baudrate Input: baudrate using macro UART_BAUD_SELECT() Returns: none **************************************************************************/ void uart_init(unsigned int baudrate) { UART_TxHead = 0; UART_TxTail = 0; UART_RxHead = 0; UART_RxTail = 0; #if defined( AT90_UART ) /* set baud rate */ UBRR = (unsigned char)baudrate; /* enable UART receiver and transmmitter and receive complete interrupt */ UART0_CONTROL = _BV(RXCIE)|_BV(RXEN)|_BV(TXEN); #elif defined (ATMEGA_USART) /* Set baud rate */ if ( baudrate & 0x8000 ) { UART0_STATUS = (1<<U2X); //Enable 2x speed baudrate &= ~0x8000; } UBRRH = (unsigned char)(baudrate>>8); UBRRL = (unsigned char) baudrate; /* Enable USART receiver and transmitter and receive complete interrupt */ UART0_CONTROL = _BV(RXCIE)|(1<<RXEN)|(1<<TXEN); /* Set frame format: asynchronous, 8data, no parity, 1stop bit */ #ifdef URSEL UCSRC = (1<<URSEL)|(3<<UCSZ0); #else UCSRC = (3<<UCSZ0); #endif #elif defined (ATMEGA_USART0 ) /* Set baud rate */ if ( baudrate & 0x8000 ) { UART0_STATUS = (1<<U2X0); //Enable 2x speed baudrate &= ~0x8000; } UBRR0H = (unsigned char)(baudrate>>8); UBRR0L = (unsigned char) baudrate; /* Enable USART receiver and transmitter and receive complete interrupt */ UART0_CONTROL = _BV(RXCIE0)|(1<<RXEN0)|(1<<TXEN0); /* Set frame format: asynchronous, 8data, no parity, 1stop bit */ #ifdef URSEL0 UCSR0C = (1<<URSEL0)|(3<<UCSZ00); #else UCSR0C = (3<<UCSZ00); #endif #elif defined ( ATMEGA_UART ) /* set baud rate */ if ( baudrate & 0x8000 ) { UART0_STATUS = (1<<U2X); //Enable 2x speed baudrate &= ~0x8000; } UBRRHI = (unsigned char)(baudrate>>8); UBRR = (unsigned char) baudrate; /* Enable UART receiver and transmitter and receive complete interrupt */ UART0_CONTROL = _BV(RXCIE)|(1<<RXEN)|(1<<TXEN); #endif }/* uart_init */ /************************************************************************* Function: uart_getc() Purpose: return byte from ringbuffer Returns: lower byte: received byte from ringbuffer higher byte: last receive error **************************************************************************/ unsigned int uart_getc(void) { unsigned char tmptail; unsigned char data; if ( UART_RxHead == UART_RxTail ) { return UART_NO_DATA; /* no data available */ } /* calculate /store buffer index */ tmptail = (UART_RxTail + 1) & UART_RX_BUFFER_MASK; UART_RxTail = tmptail; /* get data from receive buffer */ data = UART_RxBuf[tmptail]; return (UART_LastRxError << 8) + data; }/* uart_getc */ /************************************************************************* Function: uart_putc() Purpose: write byte to ringbuffer for transmitting via UART Input: byte to be transmitted Returns: none **************************************************************************/ void uart_putc(unsigned char data) { unsigned char tmphead; tmphead = (UART_TxHead + 1) & UART_TX_BUFFER_MASK; while ( tmphead == UART_TxTail ){ ;/* wait for free space in buffer */ } UART_TxBuf[tmphead] = data; UART_TxHead = tmphead; /* enable UDRE interrupt */ UART0_CONTROL |= _BV(UART0_UDRIE); }/* uart_putc */ /************************************************************************* Function: uart_puts() Purpose: transmit string to UART Input: string to be transmitted Returns: none **************************************************************************/ void uart_puts(const char *s ) { while (*s) uart_putc(*s++); }/* uart_puts */ /************************************************************************* Function: uart_puts_p() Purpose: transmit string from program memory to UART Input: program memory string to be transmitted Returns: none **************************************************************************/ void uart_puts_p(const char *progmem_s ) { register char c; while ( (c = pgm_read_byte(progmem_s++)) ) uart_putc(c); }/* uart_puts_p */ /* * these functions are only for ATmegas with two USART */ #if defined( ATMEGA_USART1 ) SIGNAL(UART1_RECEIVE_INTERRUPT) /************************************************************************* Function: UART1 Receive Complete interrupt Purpose: called when the UART1 has received a character **************************************************************************/ { unsigned char tmphead; unsigned char data; unsigned char usr; unsigned char lastRxError; /* read UART status register and UART data register */ usr = UART1_STATUS; data = UART1_DATA; /* */ lastRxError = (usr & (_BV(FE1)|_BV(DOR1)) ); /* calculate buffer index */ tmphead = ( UART1_RxHead + 1) & UART_RX_BUFFER_MASK; if ( tmphead == UART1_RxTail ) { /* error: receive buffer overflow */ lastRxError = UART_BUFFER_OVERFLOW >> 8; }else{ /* store new index */ UART1_RxHead = tmphead; /* store received data in buffer */ UART1_RxBuf[tmphead] = data; } UART1_LastRxError = lastRxError; } SIGNAL(UART1_TRANSMIT_INTERRUPT) /************************************************************************* Function: UART1 Data Register Empty interrupt Purpose: called when the UART1 is ready to transmit the next byte **************************************************************************/ { unsigned char tmptail; if ( UART1_TxHead != UART1_TxTail) { /* calculate and store new buffer index */ tmptail = (UART1_TxTail + 1) & UART_TX_BUFFER_MASK; UART1_TxTail = tmptail; /* get one byte from buffer and write it to UART */ UART1_DATA = UART1_TxBuf[tmptail]; /* start transmission */ }else{ /* tx buffer empty, disable UDRE interrupt */ UART1_CONTROL &= ~_BV(UART1_UDRIE); } } /************************************************************************* Function: uart1_init() Purpose: initialize UART1 and set baudrate Input: baudrate using macro UART_BAUD_SELECT() Returns: none **************************************************************************/ void uart1_init(unsigned int baudrate) { UART1_TxHead = 0; UART1_TxTail = 0; UART1_RxHead = 0; UART1_RxTail = 0; /* Set baud rate */ if ( baudrate & 0x8000 ) { UART1_STATUS = (1<<U2X1); //Enable 2x speed baudrate &= ~0x8000; } UBRR1H = (unsigned char)(baudrate>>8); UBRR1L = (unsigned char) baudrate; /* Enable USART receiver and transmitter and receive complete interrupt */ UART1_CONTROL = _BV(RXCIE1)|(1<<RXEN1)|(1<<TXEN1); /* Set frame format: asynchronous, 8data, no parity, 1stop bit */ #ifdef URSEL1 UCSR1C = (1<<URSEL1)|(3<<UCSZ10); #else UCSR1C = (3<<UCSZ10); #endif }/* uart_init */ /************************************************************************* Function: uart1_getc() Purpose: return byte from ringbuffer Returns: lower byte: received byte from ringbuffer higher byte: last receive error **************************************************************************/ unsigned int uart1_getc(void) { unsigned char tmptail; unsigned char data; if ( UART1_RxHead == UART1_RxTail ) { return UART_NO_DATA; /* no data available */ } /* calculate /store buffer index */ tmptail = (UART1_RxTail + 1) & UART_RX_BUFFER_MASK; UART1_RxTail = tmptail; /* get data from receive buffer */ data = UART1_RxBuf[tmptail]; return (UART1_LastRxError << 8) + data; }/* uart1_getc */ /************************************************************************* Function: uart1_putc() Purpose: write byte to ringbuffer for transmitting via UART Input: byte to be transmitted Returns: none **************************************************************************/ void uart1_putc(unsigned char data) { unsigned char tmphead; tmphead = (UART1_TxHead + 1) & UART_TX_BUFFER_MASK; while ( tmphead == UART1_TxTail ){ ;/* wait for free space in buffer */ } UART1_TxBuf[tmphead] = data; UART1_TxHead = tmphead; /* enable UDRE interrupt */ UART1_CONTROL |= _BV(UART1_UDRIE); }/* uart1_putc */ /************************************************************************* Function: uart1_puts() Purpose: transmit string to UART1 Input: string to be transmitted Returns: none **************************************************************************/ void uart1_puts(const char *s ) { while (*s) uart1_putc(*s++); }/* uart1_puts */ /************************************************************************* Function: uart1_puts_p() Purpose: transmit string from program memory to UART1 Input: program memory string to be transmitted Returns: none **************************************************************************/ void uart1_puts_p(const char *progmem_s ) { register char c; while ( (c = pgm_read_byte(progmem_s++)) ) uart1_putc(c); }/* uart1_puts_p */ #endif |
Downloads



