IR (Infrared) obstacle avoidance Sensor module uses infrared reflection principle to detect obstacle. This sensor has a high precision components paired of infrared transmitter and receiver. The transmitter tubes emit a certain frequency of infrared when detecting a direction or obstacle or a reflector the infrared receiver tube receive a reflected signal came from the obstacle then the indicator output will turn to HIGH as you can see at the board there are two type of trimmer or potentiometer knob to adjust the distance from 2 to 40 cm. running at 3.3v or 5v dc.
Required Components
- Raspberry Pi / Banana Pi / Orange Pi (If your using Banana Pi or Orange See first the GPIO Pins)
- Obstacle Avoidance / Obstacle Sensor Module Board
- Solder Less Breadboard
- Jumper Wire / DuPont Wire
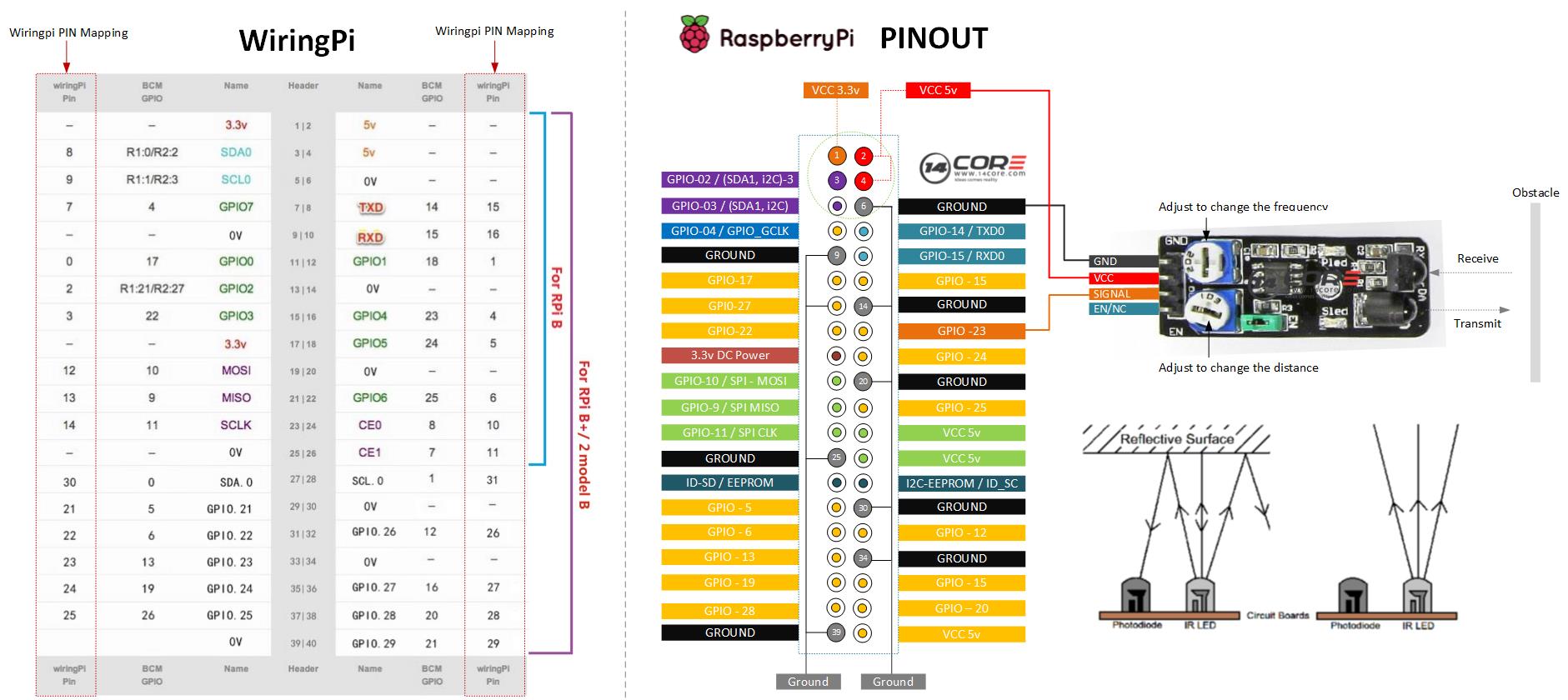
Wiring Diagram
CCode with WiringPi
Python Code
Wiring IR (Infrared) Obstacle Avoidance Sensor with Raspberry Pi



