How to Use Sonar Powered Ultrasonic Sensor Module HC SR04 with Arduino
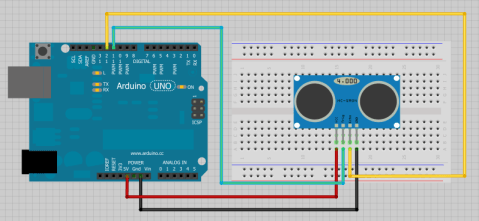
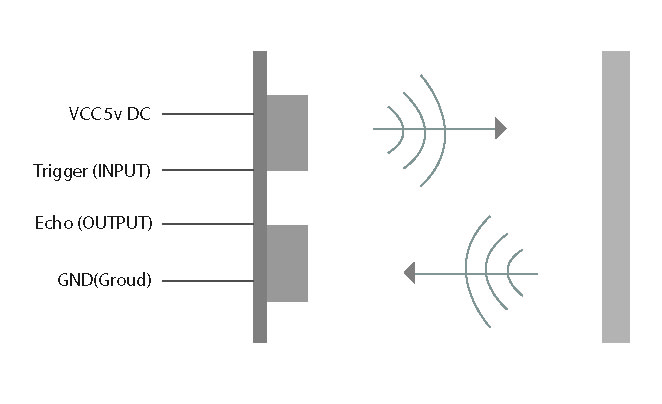
This tutorial is about how to use Ultrasonic Sensor HC-SR04 with Arduino UNO, The Ultrasonic HC-SR04 sensor uses SONAR to determine the distance to an obstacle or an object like Bats, an excellent digital non-contact range detection with high accuracy and stable reading. From 2 centimeter to 400 centimeter. The operation is not affected by any light or a colored objects it has a sharp rangefinder although acoustically soft material like cloth can be difficult to detect. it has a complete sonar powered Ultrasonic Transmitter and Receiver Module, Tested in Arduino, Raspberry Pi and Common Micro Controller.
Features
• Power Supply :+5V DC
• Quiescent Current : <2mA
• Working Current: 15mA
• Effectual Angle: <15°
• Measuring Angle: 30 degree
• Trigger Input Pulse width: 10uS
• Dimension: 45mm x 20mm x 15mm
• Ranging Distance : 2cm – 400 cm/1″ – 13ft
• Resolution : 0.3 cm
We use cookie to provide you the best possible experience, this site uses cookies and by continuing to use the site you agree that we can save them on your device. Cookies are small text files which are placed on your computer and which remember your preference / some details of your visit. Our cookies don’t collect any personal information. For information, please read our Privacy Statement and Cookie Policy , which also explains how to disable this option in your browser. Cookie SettingsACCEPT
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are as essential for the working of basic functionalit...
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.