Working with Ultrasonic Ranging Sensor Module on Arduino
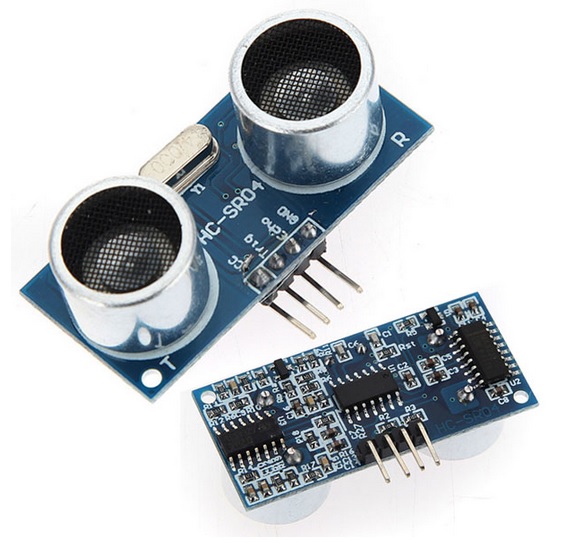
The HC-SR04 Ultrasonic Ranging Sensor is a non contact distance measuring module device commonly use in Robotic Obstacle Avoidance. The HC SR04 has a high ranging accuracy. The measurement range can go up to 5 meter, which would be helpful for your project.
Characteristics
Power supply: 5v DC
Effectual angle: < 15°
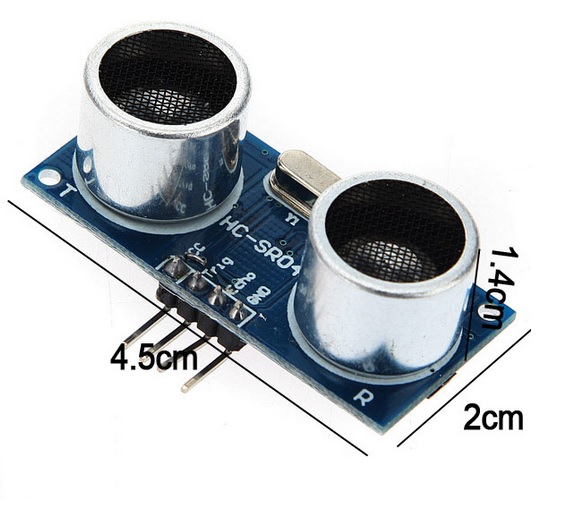
Ranging distance: 2cm-500 cm
Resolution: 1 cm
Ultrasonic Frequency: 40k Hz
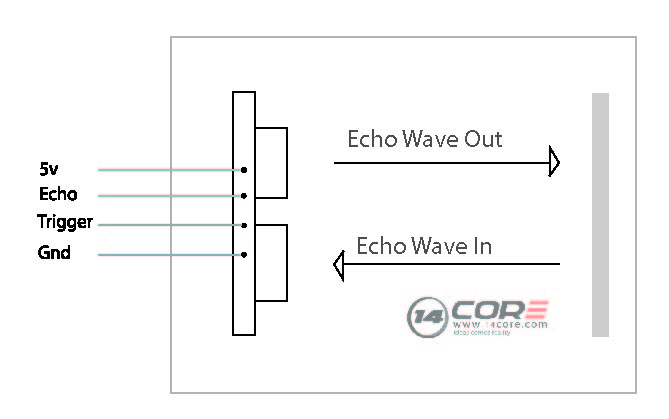
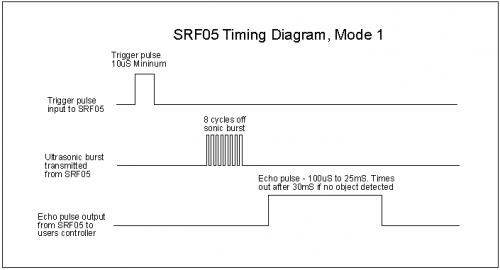
A short pulse is transmitter at the time of zero, reflected by an object back to the trigger. The sensor receives the signal and converts it to an electrical signal. The next pulse can be transmitted when the echo is fade. This period of time is called cycle period. Recommended period of cycle should < 50ms if a ten μs pulse is sent to the signal pi. The Ultrasonic Ranging Sensor module will output 8-40kHz signal detect the echo back. Measuring distance is proportional to the echo pulse width and calculated by the formula. if no obstacle the detection output pin will give a 38ms high level signal.
We use cookie to provide you the best possible experience, this site uses cookies and by continuing to use the site you agree that we can save them on your device. Cookies are small text files which are placed on your computer and which remember your preference / some details of your visit. Our cookies don’t collect any personal information. For information, please read our Privacy Statement and Cookie Policy , which also explains how to disable this option in your browser. Cookie SettingsACCEPT
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are as essential for the working of basic functionalit...
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.