/*
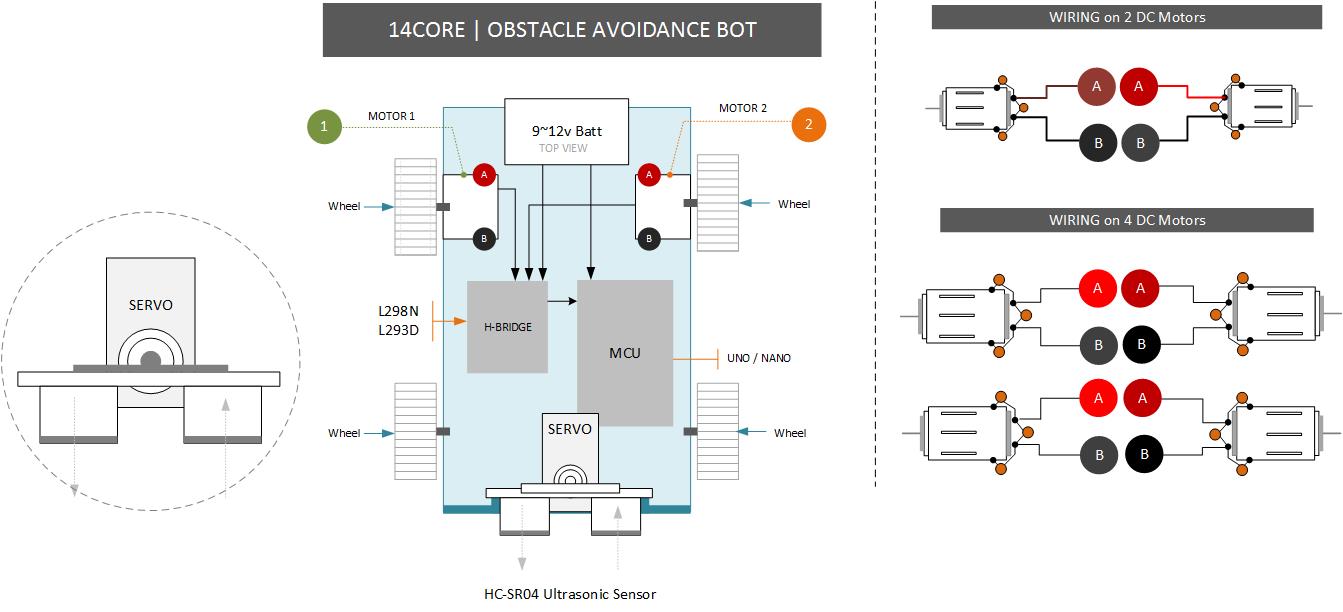
14CORE OBSTACLE AVOINDACE ROBOT
======================TEST CODE
*/
#include <NewPing.h> //
#include <AFMotor.h> // You can download the code library below
#include <Servo.h> //
// Ultranic Pin Configuration
#define TRIG_PIN A5
#define ECHO_PIN A4
#define MAX_DISTANCE 400
#define MAX_SPEED 255
#define MAX_SPEED_OFFSET -8
#define COLL_DIST 20
#define TURN_DIST COLL_DIST+10
#define ACT_TIME 250
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE);
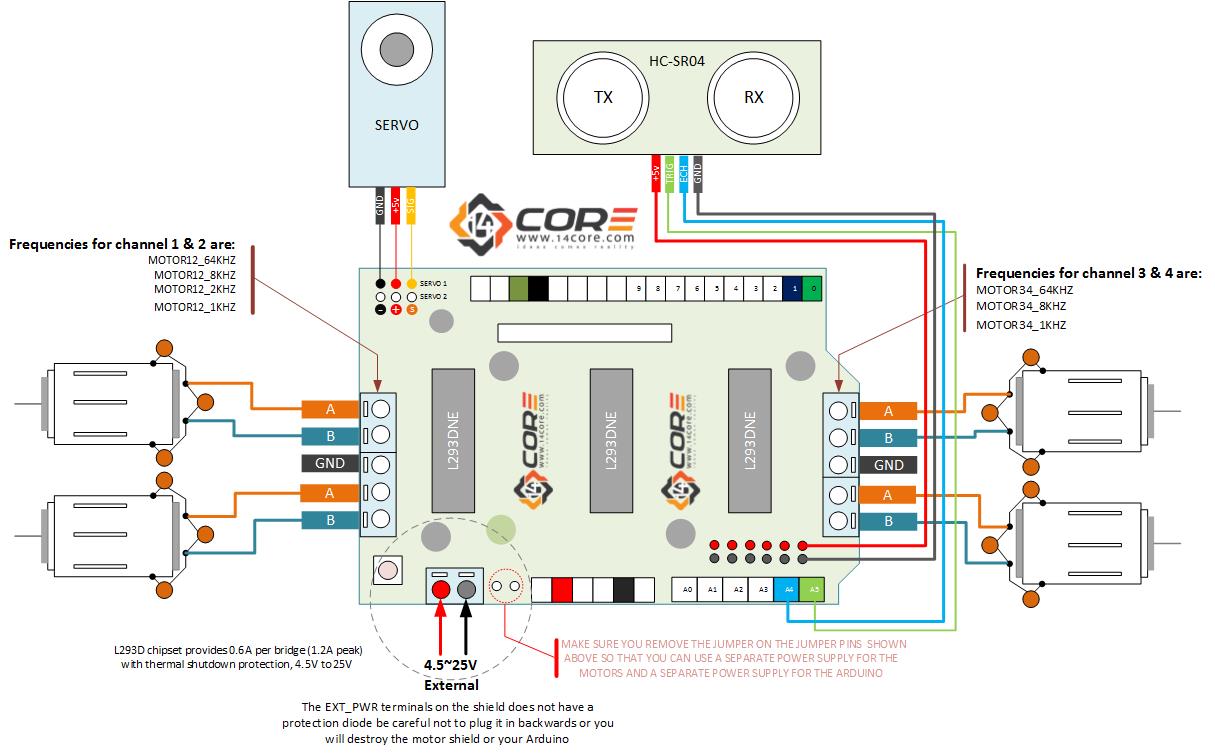
AF_DCMotor motorR(1, MOTOR12_1KHZ); // Set motor #1, 1kHz PWM
AF_DCMotor motorL(4, MOTOR12_1KHZ); // Set motor #2, 1kHz PWM
Servo myservo; // Set servo object to control a servo
String motorSet = "";
int curDist = 0, pos, speedSet = 0;
//int pos;
//int speedSet = 0;
void setup() {
myservo.attach(9); // Set to attach the servo on pin 9
myservo.write(90); // Write 90 to face servo forward
delay(2000);
motorSet = "FORWARD";
moveForward();
}
void loop() {
checkPath();
}
void checkPath() {
int curLeft = 0; int curRight = 0; int curFront = 0;
curDist = 0;
checkForward();
myservo.write(135);
delay(100);
for (pos = 135; pos >= 45; pos -= 45) {
myservo.write(pos);
delay(170);
curDist = readPing();
if (curDist < COLL_DIST) { checkCourse(); break; }
if (curDist < TURN_DIST) { changePath(); }
}
}
int readPing() {
int cm = 0;
while (cm < 2) {int uS = sonar.ping(); cm = uS/US_ROUNDTRIP_CM;}
return cm;
}
void checkForward() {
if (motorSet=="FORWARD") { motorR.run(FORWARD); motorL.run(FORWARD); }
}
void changePath() {
if (pos < 90) { veerLeft(); }
if (pos > 90) { veerRight(); }
}
void veerRight() {
motorR.run(BACKWARD); motorL.run(FORWARD);
delay(ACT_TIME);
motorR.run(FORWARD); motorL.run(FORWARD);
motorSet = "FORWARD";
}
void veerLeft() {
motorL.run(BACKWARD); motorR.run(FORWARD);
delay(ACT_TIME);
motorL.run(FORWARD); motorR.run(FORWARD);
motorSet = "FORWARD";
}
void checkCourse() {
moveBackward();
delay(ACT_TIME);
moveStop();
setCourse();
}
void setCourse() {
if (pos < 90) { turnRight(); }
if (pos > 90) { turnLeft(); }
}
void moveBackward() {
motorSet = "BACKWARD";
motorR.run(BACKWARD); // Turn right motor backward
motorL.run(BACKWARD); // Turn left motor backward
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2)
{
motorL.setSpeed(speedSet);
motorR.setSpeed(speedSet+MAX_SPEED_OFFSET);
delay(5);
}
}
void moveForward() {
motorSet = "FORWARD";
checkForward();
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2) {
motorL.setSpeed(speedSet);
motorR.setSpeed(speedSet+MAX_SPEED_OFFSET);
delay(4);
}
}
void moveStop() { motorR.run(RELEASE); motorL.run(RELEASE); }
void turnRight() {
motorSet = "RIGHT";
motorR.run(FORWARD); // Turn right motor forward
motorL.run(BACKWARD); // Turn left motor backward
delay(ACT_TIME);
motorSet = "FORWARD";
checkForward();
}
void turnLeft() {
motorSet = "LEFT";
motorR.run(BACKWARD); // Turn right motor backward
motorL.run(FORWARD); // Turn left motor forward
delay(ACT_TIME);
motorSet = "FORWARD";
checkForward();
}
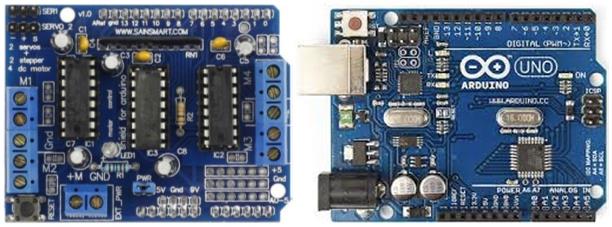




Where do u connect the arduino?
Note: it is actually an L2983D Arduino UNO Shield. see above image :) Regards
Hi, can you send me a circuit and code for same but 2 servo’s and 2 ultrasonic sensor’s? Thanks